Call or Text: +1 (208) 425-2990
Email: Sales@DroneSprayPro.com

Multi-Drone Path Planning for Spot Spraying
Key Takeaway: Multi-drone systems are transforming spot spraying in agriculture by optimizing pesticide use, reducing costs, and improving precision. However, choosing the right algorithm for path planning depends on the size of the field, obstacles, and required precision. Here's what you need to know:
Quick Summary
- Why It Matters: Spot spraying reduces chemical use, minimizes contamination, and saves costs compared to blanket spraying.
- Challenges: Drones face limits like battery life, pesticide capacity, and complex field layouts.
-
Algorithms Compared: Four key methods - A*, RRT, Genetic Algorithms, and PSO - address these challenges differently:
- A*: Finds shortest paths but struggles with scalability.
- RRT: Handles real-time obstacle avoidance but results in less efficient paths.
- Genetic Algorithms: Optimizes multi-drone coordination but requires high computational power.
- PSO: Balances speed and group coordination but risks local optima issues.
Quick Comparison
| Algorithm | Strength | Weakness | Best For |
|---|---|---|---|
| A* | Shortest pathfinding | High memory usage, poor scaling | Small fields, static obstacles |
| RRT | Real-time obstacle avoidance | Jagged, sub-optimal paths | Dynamic environments |
| Genetic Algorithms | Multi-drone coordination | Computationally intensive | Large, complex fields |
| PSO | Fast, decentralized planning | Risk of local optima | Real-time, large-scale planning |
Bottom Line: Smaller, simpler fields suit A*. Larger or obstacle-heavy areas need hybrid approaches, combining Genetic Algorithms and PSO for better efficiency and precision.
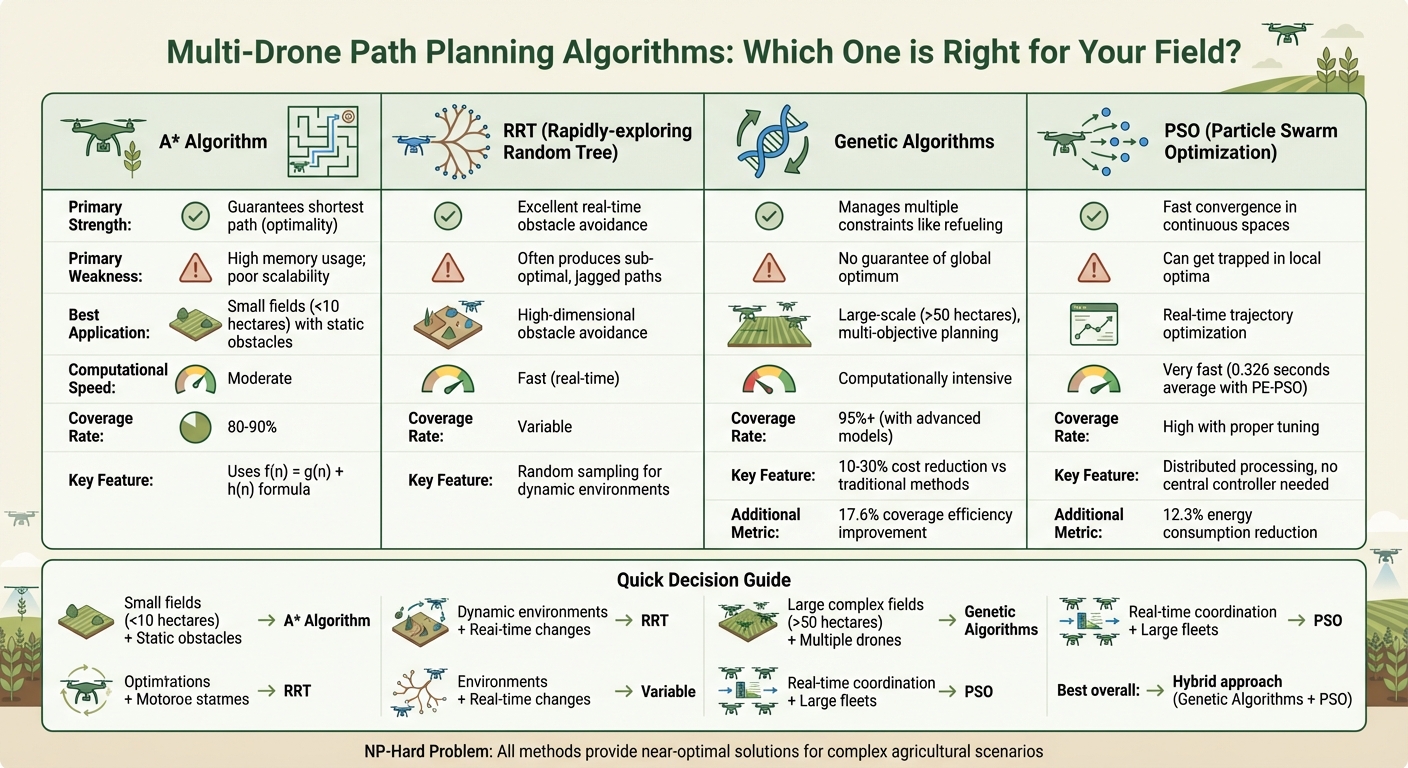
Multi-Drone Path Planning Algorithms Comparison for Spot Spraying
Spraying First Pass With Three Drones! | XAG P100, DJI T50 & T40
1. A* Algorithm
The A* algorithm is a popular method for finding the shortest path between targets in a field. It uses the formula f(n) = g(n) + h(n), where g(n) represents the actual cost from the starting point to a specific node, and h(n) estimates the cost from that node to the target. This combination ensures A* consistently delivers the optimal route under identical conditions, making it dependable for repetitive agricultural tasks. However, it assumes a static environment, so any changes - like moving obstacles - require recalculating the entire path [3].
Efficiency
A* is notably more efficient than basic pathfinding methods because it focuses only on the most promising routes, minimizing unnecessary exploration [3]. However, as field conditions become more complex, maintaining this efficiency becomes increasingly challenging, as discussed in the Scalability section.
Scalability
When applied to large-scale agricultural operations, A* encounters significant scalability issues. Fields with more spray targets, drones, or operational constraints demand far greater computational resources [3]. The complexity grows exponentially as the dimensions of the problem increase [3]. While A* is effective for simple point-to-point navigation, it often needs to be combined with other methods to handle coordination across multiple targets in larger, more intricate fields.
Computational Complexity
Using finer grid resolutions can improve the precision of targeting, but this comes at the cost of increased memory usage and processing demands [3]. Studies suggest that traditional algorithms like A* and RRT, which rely on random sampling, can struggle in complex environments, resulting in slower convergence [5]. For fields with irregular shapes or challenging terrain, A* is typically part of a broader planning system rather than a standalone solution. Beyond computational concerns, these algorithms must also account for practical field constraints, as detailed in the section on spot-spraying precision.
Spot-Spraying Precision
To ensure the calculated paths align with real-world operational needs, smoothing techniques, such as B-spline curves, are often applied [2]. This is especially important to meet drones' turning constraints and maintain precision during low-altitude operations [2]. While advanced swarm intelligence models can achieve coverage rates exceeding 95% in irregular fields, traditional methods like A* typically result in coverage rates between 80% and 90% [4]. Additionally, it is essential to ensure all waypoints remain within field boundaries to avoid errors, particularly in scenarios requiring high precision.
2. RRT (Rapidly-exploring Random Tree)
The Rapidly-exploring Random Tree (RRT) algorithm takes a different approach compared to A*. It uses random sampling to quickly identify feasible, obstacle-free paths, making it ideal for real-time spot spraying. As E. Viridiana Vazquez-Carmona et al. explained in Computers & Industrial Engineering:
The calculated path was transferred to a flight trajectory using the rapidly exploring random tree to avoid obstacles [2]
This highlights how RRT effectively converts coverage plans into practical flight paths, ensuring drones can navigate dynamic environments with ease.
Efficiency
RRT thrives in dynamic settings where conditions can shift mid-mission. Unlike deterministic methods that rely on static assumptions, this algorithm adapts to sudden changes, such as unexpected obstacles. By using random sampling, RRT avoids the computational burden of mapping an entire field, making it a strong choice for real-time applications [3]. While it may not always produce the shortest route, it prioritizes speed and feasibility - critical factors in time-sensitive scenarios.
Scalability
When managing multiple drones in complex, high-dimensional environments, RRT's random tree expansion method proves highly effective. It handles intricate configurations better than potential field methods, which can sometimes get stuck in less-than-ideal solutions [3].
Computational Complexity
Coverage Path Planning is classified as NP-Hard [2], meaning it requires significant computational effort. To address this, RRT is often used after Genetic Algorithms determine the sequence of target areas. RRT then refines these plans into three-dimensional, collision-free paths, leveraging its strength in obstacle navigation. This combination ensures efficient fleet coordination, even in challenging, obstacle-filled agricultural landscapes [2].
Spot-Spraying Precision
In precision agriculture, RRT enables drones to stay close to target areas while safely avoiding obstacles like trees, power lines, and uneven terrain. This is especially valuable in orchards or irregularly shaped fields, where standard back-and-forth patterns may not suffice. The algorithm strikes a balance between fast route calculation and the precision needed for accurate spot spraying [2].
3. Genetic Algorithms
Genetic Algorithms (GAs) take optimization to a new level by focusing on the complex, interconnected parameters involved in multi-drone coordination. Unlike earlier methods that primarily deal with pathfinding, GAs tackle challenges like flight angles, entry points, drone assignments, and launch sequences - all aimed at minimizing mission costs and time [8].
The process begins by dividing the field into smaller, manageable sub-sections based on area proportions. Within these partitions, the algorithm fine-tunes specific routes for each drone [8]. However, as researchers at Satbayev University explain, optimizing everything simultaneously isn’t practical:
Simultaneous optimization of polygon subdivision and flight parameters is infeasible, as changing the polygon subdivision... can render previously optimal flight parameters suboptimal [8]
This two-step method ensures efficient and cost-effective route planning.
Efficiency
GAs are particularly effective at reducing operational costs by synchronizing drones and ground support systems. In September 2025, Kirill Yakunin and Adilkhan Symagulov from Satbayev University demonstrated that their two-stage GA optimization approach cut coverage costs by 10% to 30% compared to traditional zigzag traversal methods [8]. Additionally, the algorithm optimizes takeoff and landing points, aligning them with the route of a mobile platform - like a truck moving through the field - thereby reducing downtime for battery swaps and refills.
Scalability
When it comes to managing large fleets across irregularly shaped fields with obstacles, GAs shine where simpler methods fall short. They can handle heterogeneous fleets, assigning drones with different speeds, ranges, and operational costs to the most suitable field segments [8]. For example, China’s agricultural drone fleet grew from 4,000 units in 2016 to over 120,000 by 2021 [7], highlighting the growing need for scalable systems. However, because the problem is NP-hard, efficient heuristics are essential for practical solutions.
Computational Complexity
Coverage Path Planning is classified as NP-hard [2][8], meaning that finding exact solutions becomes increasingly impractical as field complexity grows. GAs, however, excel at finding near-optimal solutions despite these challenges. As Yakunin's team pointed out:
Genetic algorithms are metaheuristics based on stochastic selection methods that do not guarantee finding a global optimum but allow a solution close to the optimal one to be obtained [8]
This ability to balance efficiency and scalability makes GAs a valuable tool for solving complex agricultural problems.
Spot-Spraying Precision
Precision agriculture benefits significantly from GAs, particularly in defining target zones. The algorithm ensures that a drone's spray footprint - often modeled as a stochastic paraboloid - covers 100% of the target area without unnecessary overlaps [6][2]. Multi-drone models using GA optimization have achieved a 17.6% improvement in coverage efficiency and reduced total energy consumption by 12.3% compared to older methods [6]. These gains highlight the potential of coordinated multi-drone operations to enhance agricultural productivity.
sbb-itb-3b7eef7
4. Particle Swarm Optimization
Particle Swarm Optimization (PSO) is a technique inspired by the way flocks of birds or schools of fish move together. In multi-drone operations, it helps coordinate fleets by having "particles" (representing drones) refine their paths based on both individual and group experiences. For tasks like spot spraying, this means drones can adjust their routes dynamically while staying in sync with the rest of the team.
Efficiency
A specific variation of PSO, called PE-PSO, achieves impressive speed in trajectory planning. It clocks in at an average of 0.326 seconds, significantly outperforming other methods like DNSPSO (2.69 seconds) and ICPSO (1.55 seconds) [9]. This speed is partly due to the use of B-spline curves, which reduce the number of variables involved in optimization. As Minze Li and colleagues noted:
Standard PSO exhibits critical limitations in the context of online multi-UAV planning... the computational burden increases exponentially when extended to swarm-level coordination [9]
By combining Genetic Algorithms for task allocation with distributed PSO for refining individual paths, this method achieves a balance between global coordination and quick, localized adjustments. This approach is particularly effective for managing larger drone fleets.
Scalability
PSO's distributed design allows each drone to calculate its own path independently, eliminating the need for a central controller. This parallel processing makes it highly scalable. However, it does have trade-offs. Centralized systems provide better global coordination but struggle with increased computational demands as the fleet grows. In contrast, distributed PSO ensures swarm cohesion through shared data while letting drones operate independently [9]. To further enhance performance, an entropy-based parameter adjustment strategy dynamically shifts focus between exploring new areas and refining known paths, avoiding the problem of stagnation in less optimal solutions.
Computational Complexity
The complexity of planning for multiple drones is an NP-hard problem, meaning it can be computationally overwhelming. PE-PSO tackles this by reinitializing poorly performing particles during each iteration. This keeps the swarm adaptive and prevents the need for a complete restart [9]. This strategy ensures efficient exploration and allows near-optimal solutions to be found in milliseconds. When paired with Genetic Algorithms for broader coordination, this approach balances computational demands with effective problem-solving.
Spot-Spraying Precision
PSO also prioritizes precision in spot spraying. A "safety distance" parameter (around 3.3 feet or 1 meter) ensures drones avoid obstacles while effectively covering irregularly shaped weed patches [1][9]. The algorithm calculates the shortest, collision-free paths while guaranteeing complete coverage of the target area. When paired with advanced spray systems, like rotary nozzles that distribute droplets evenly, PSO-guided drones deliver the accuracy needed for precise and efficient spot treatments.
Advantages and Disadvantages
Different techniques for multi-drone spot spraying come with their own pros and cons. For instance, the A* algorithm is great for finding the shortest path between waypoints, making it a solid choice for smaller fields with static obstacles like pump houses or power lines. However, it demands a lot of memory and struggles with scalability, which can impact spray accuracy in larger or more complex areas [1].
RRT (Rapidly-exploring Random Tree) shines in environments with complex, real-time obstacle avoidance needs. It adapts quickly to changes but often produces jagged, non-smooth paths. This makes it better suited for generating trajectories rather than ensuring efficient coverage.
Genetic Algorithms handle multi-objective constraints like battery management and refueling well. That said, they rely on high computational power and don’t guarantee a global optimum - settling instead for near-optimal solutions. This unpredictability can lead to inconsistent results in precision agriculture.
Particle Swarm Optimization (PSO) is known for its fast convergence in complex environments and its ability to coordinate drones in real time. Yet, it’s prone to getting stuck in local optima if not carefully tuned. Like Genetic Algorithms, PSO’s stochastic nature can sometimes lead to inconsistent outcomes, especially in real-time applications [3]. These challenges often lead to hybrid approaches, which combine strengths from multiple methods to tackle complex field operations.
Here’s a quick comparison of these methods:
| Method | Primary Strength | Primary Weakness | Best Application |
|---|---|---|---|
| A* Algorithm | Guarantees shortest path (optimality) | High memory usage; poor scalability | Small fields with static obstacles |
| RRT | Excellent real-time obstacle avoidance | Often produces sub-optimal, jagged paths | High-dimensional obstacle avoidance |
| Genetic Algorithm | Manages multiple constraints like refueling | No guarantee of global optimum | Large-scale, multi-objective planning |
| Particle Swarm | Fast convergence in continuous spaces | Can get trapped in local optima | Real-time trajectory optimization |
The method you choose depends heavily on the field size and operational needs. For smaller fields with a predictable layout, A* is the go-to option for optimal paths. On the other hand, larger operations - such as managing 197 weed patches - may benefit from a hybrid approach, blending Genetic Algorithms and PSO for better coordination, even if it comes with higher computational demands [1].
Conclusion
Choosing the right path planning method depends on the size of the field, the nature of obstacles, and the level of precision required. For smaller fields with static obstacles like pump houses or power lines, the A* algorithm is a solid choice. It not only finds optimal paths but also helps conserve energy during operations [10]. These factors become even more important as the scale of operations increases.
In larger fields with scattered weed patches, a Traveling Salesman Problem (TSP)-based approach combined with area coverage planning is a better fit. The H4 refinement heuristic plays a key role here. By minimizing path crossings, it delivers near-optimal solutions without overwhelming computational demands. This method separates planning between patches from the detailed coverage needed within each patch, ensuring efficiency [1].
Precision is crucial in spot spraying. Traditional zigzag paths often leave gaps, leading to uneven pesticide application. As Mogens Plessen points out:
Baustrophedon-based area coverage is unsuitable for precision spot spraying since area coverage gaps typically result. Remedy can be provided by inclusion of a headland path [1].
In dynamic environments, techniques like Rapidly-exploring Random Trees (RRT) or other metaheuristic methods offer real-time flexibility. However, they come with higher computational costs [3]. Balancing adaptability with precise planning is essential for achieving optimal results in spot spraying.
When it comes to spot spraying, precision should take precedence over speed. Ensuring thorough coverage, even if it extends flight times slightly, leads to more consistent pesticide application and better operational outcomes.
FAQs
How can I select the best path planning method for my drones based on my field and spraying needs?
Selecting the best path planning method for your drone operations hinges on several factors, such as the size of your field, the complexity of the terrain, and the specific spraying needs.
For fields with irregular shapes or challenging terrains, coverage path planning algorithms can ensure efficient spray coverage while cutting down on unnecessary drone travel. If you're working with larger or more diverse fields, AI-driven methods can provide the precision and flexibility needed for consistent and accurate spraying.
Smaller or simpler fields, however, might benefit from traditional approaches like Rapidly-Exploring Random Trees (RRT) or Probabilistic Roadmaps (PRM). These methods are not only efficient but also scalable, making them a practical choice for straightforward layouts.
When deciding on a method, take into account your crop type, the field's layout, and the technical capabilities of your drones. Testing these approaches in actual field conditions can help you identify the most suitable solution for your precision agriculture goals.
What challenges do drones face during spot spraying in agriculture?
Spot spraying in agriculture comes with its fair share of hurdles, especially when drones are involved. One major challenge is navigating obstacles like trees, power lines, and uneven terrain. These can make it tricky to achieve accurate spraying and maintain consistent flight paths. Precision here isn’t just about avoiding collisions - it’s also about ensuring the spray reaches the intended areas without waste or gaps.
Another layer of difficulty arises when coordinating multiple drones in a fleet. Without proper synchronization, there’s a risk of overlapping coverage or leaving parts of the field untreated. On top of that, environmental factors - like wind, temperature, and humidity - can throw off spray accuracy and even destabilize the drones.
To tackle these issues, drones need a combination of tools and systems. Think reliable obstacle detection, adaptive flight algorithms that adjust to changing conditions, and precise controls to keep everything running smoothly. These features are essential for safe and efficient spraying operations.
Can using multiple algorithms improve drone efficiency for spot spraying in agriculture?
Combining different path planning algorithms can greatly enhance the efficiency of multi-drone fleets used for spot spraying in agriculture. Approaches like the Traveling Salesman Problem (TSP), area coverage strategies, and terrain-specific mapping work together to help drones navigate irregularly shaped fields more effectively. This means they can avoid obstacles like ditches and channels while cutting down on flight distances and overlapping routes.
This hybrid method improves spray coverage, reduces the time spent on operations, and cuts costs. Algorithms designed for specific terrain types can adjust in real time to handle complex environments, making them a perfect fit for precision agriculture tasks. By using multiple algorithms, drones can ensure even spray distribution and perform more efficiently, especially in large or challenging fields - like those supported by Drone Spray Pro.